Terrain, Excavation, and Regolith Interface June 24-May 25

After my success with 2024’s ELE Rover, I spent the months of summer going over the post mortem. I reviewed data on my and every other team's rover. It was too heavy, way too slow, and only used 10% of the bucket’s capacity. I met with Ph.D. advisors in Robotics, Mechanical Engineering, Electrical Engineering, Systems Engineering, and Solid Mechanics to discuss improvements. After a year of work, T.E.R.I is the result - and it paid off.
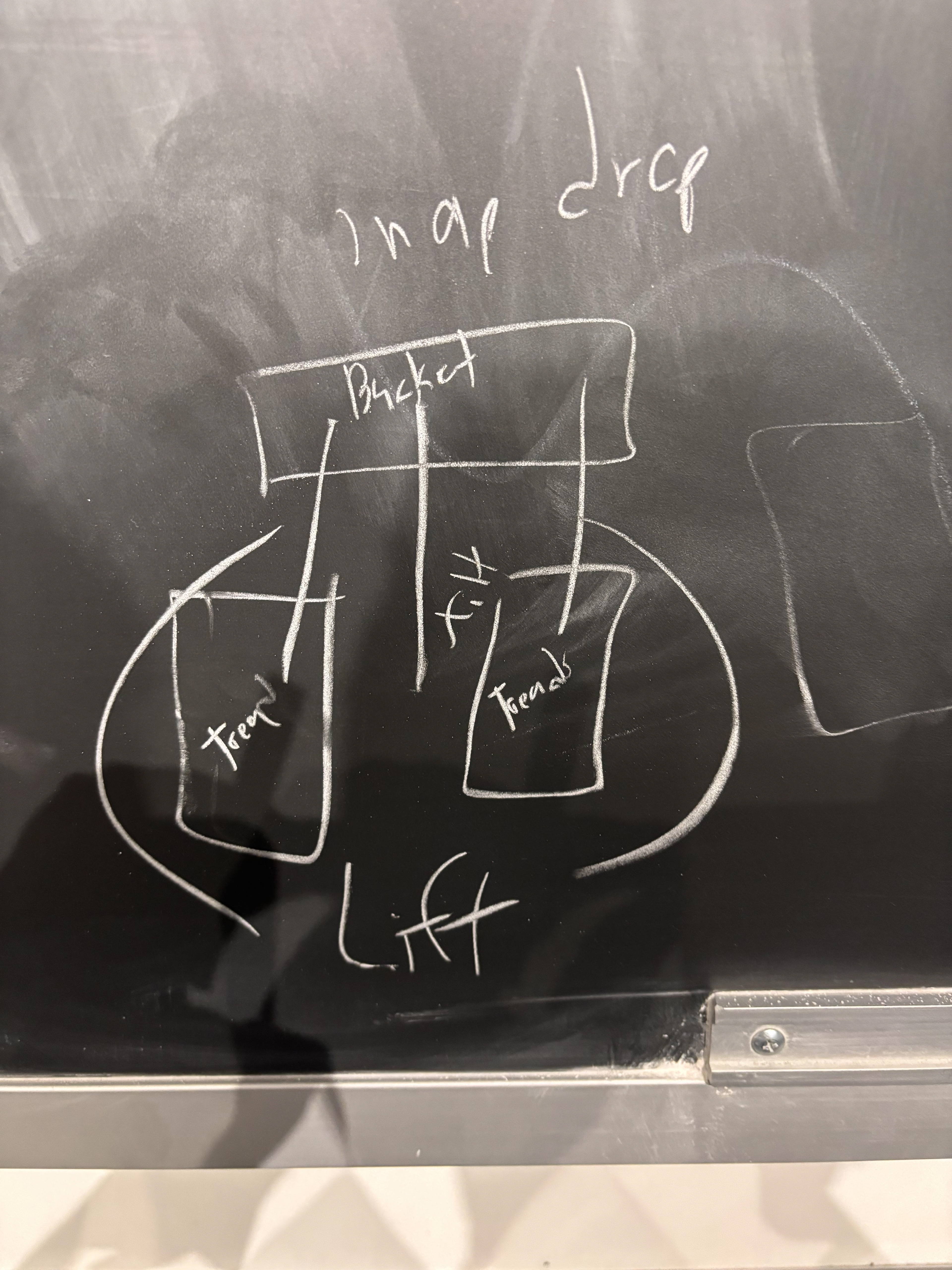
The first chalk board sketch of the new front loader robot.
The first detailed proposal sketch, for the decision matrix.
After all the proposals went through a series of decision matrices using the - method, the group accepted my proposal for an extremely low center of mass skid steer front loader. This decision reflected earth industry standards, applied to our unique project in the tough Lunar Soil. Our simulant, BP-1, is incredibly tough. Rather than erosion, it is created in blast sites resulting in incredibly fine and sharp particles with a flexible density of 20%-160% the density of water. Solving this problem needed something with massive tires to drive without sinking, a low COM to be steady without weighing too much, and very powerful lift actuators to raise material denser and heavier than the robot.
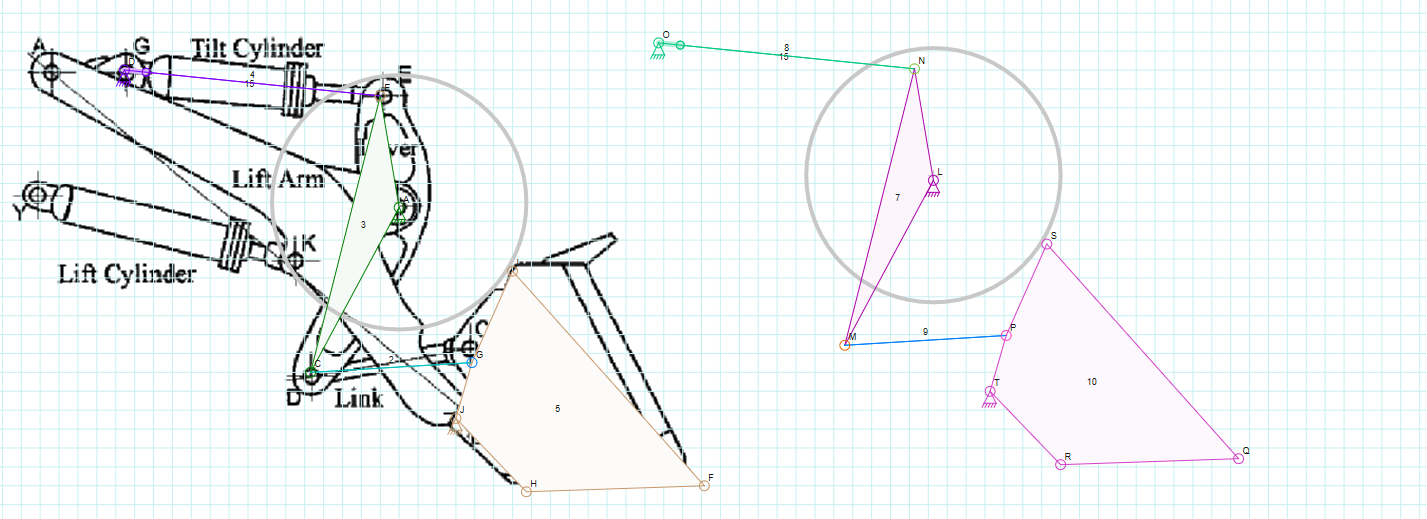
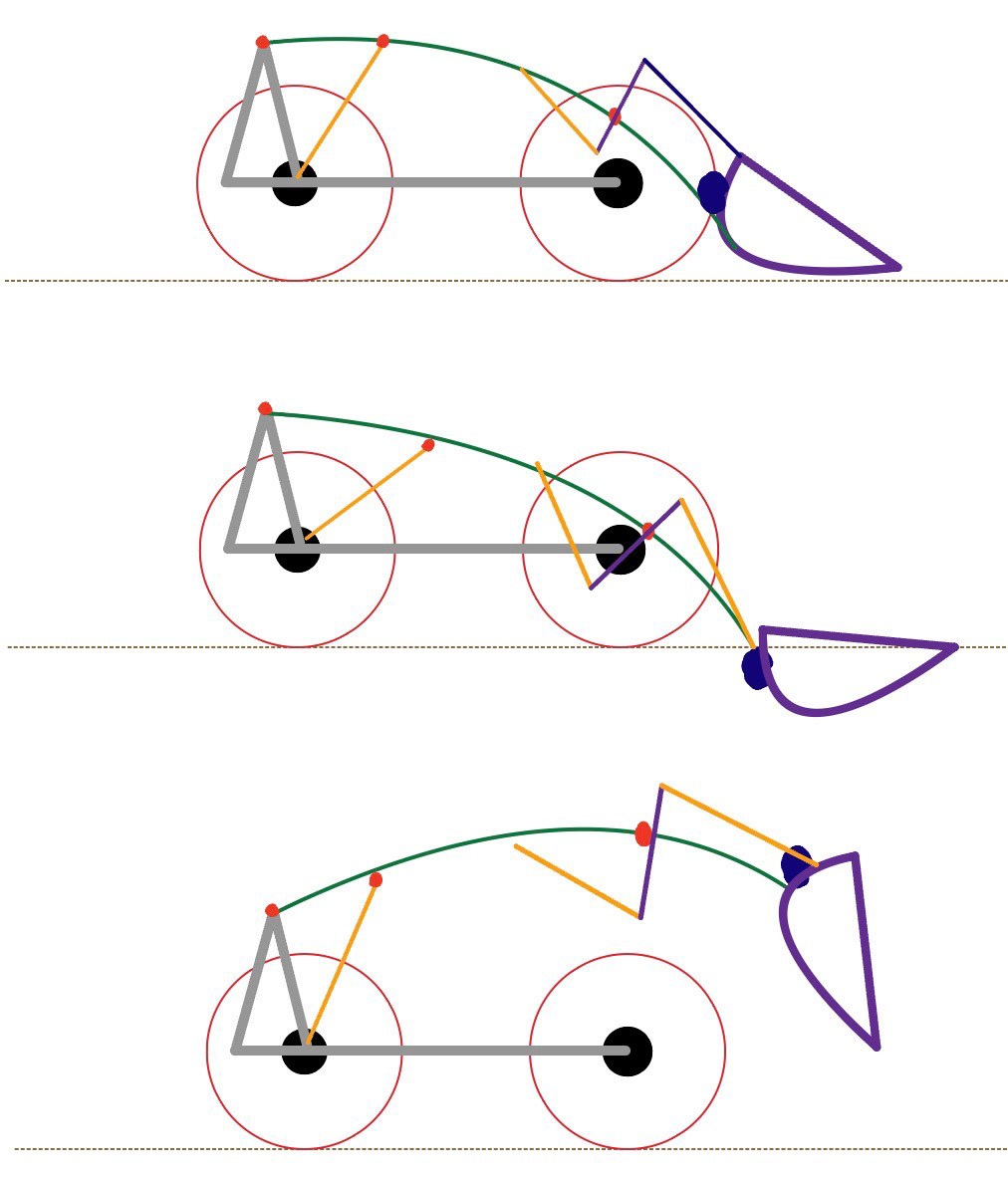
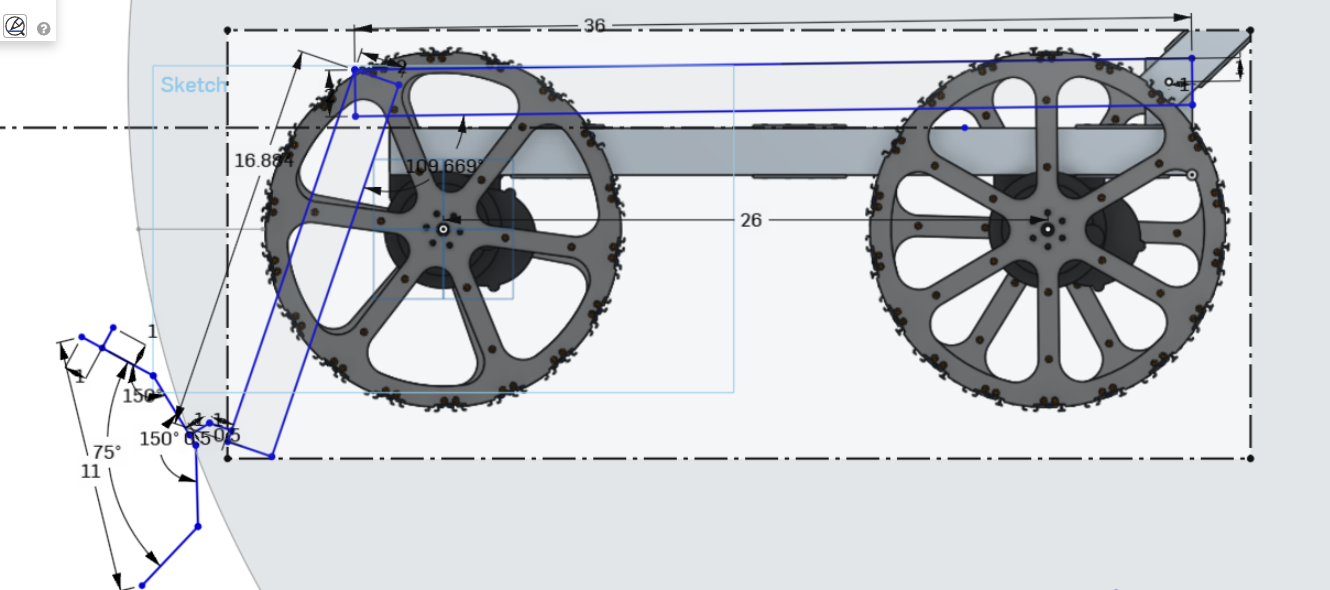
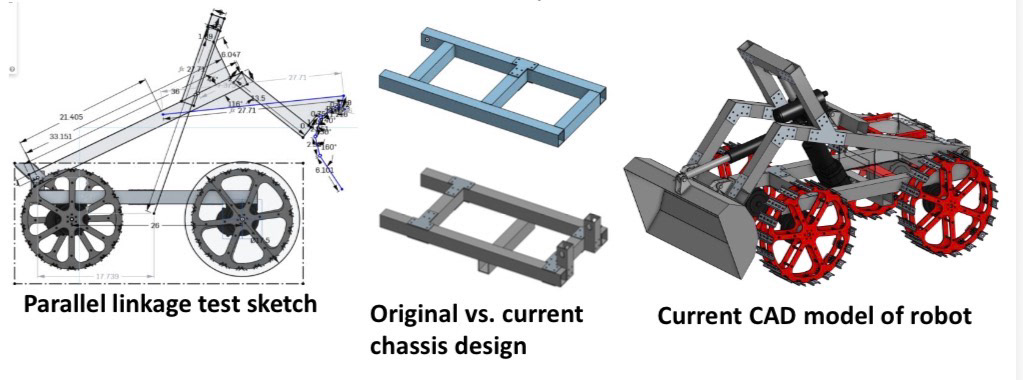
Using software called Linkage, I worked out a physical model of the lift and tilt actuators which would hit the lower and upper bounds, while minimizing mechanical disadvantage (>1), increasing the speed of the actuators from their 0.8” per second to a leveraged 2” per second. A strong advantage of this design was that it moved slowly but strongly in the ground but sped up when it approached dumping.
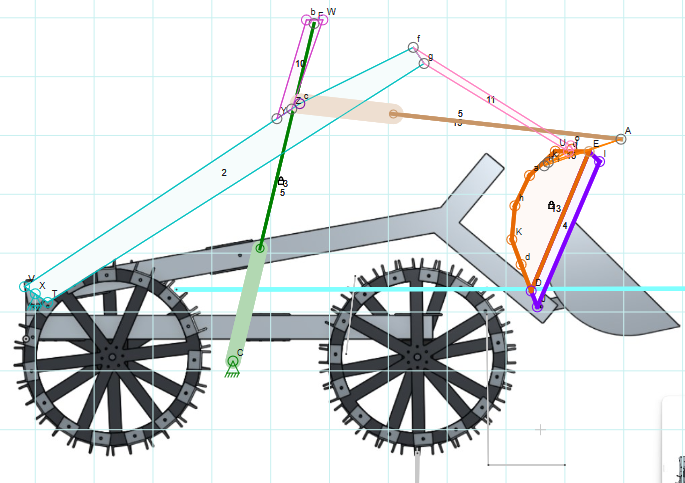
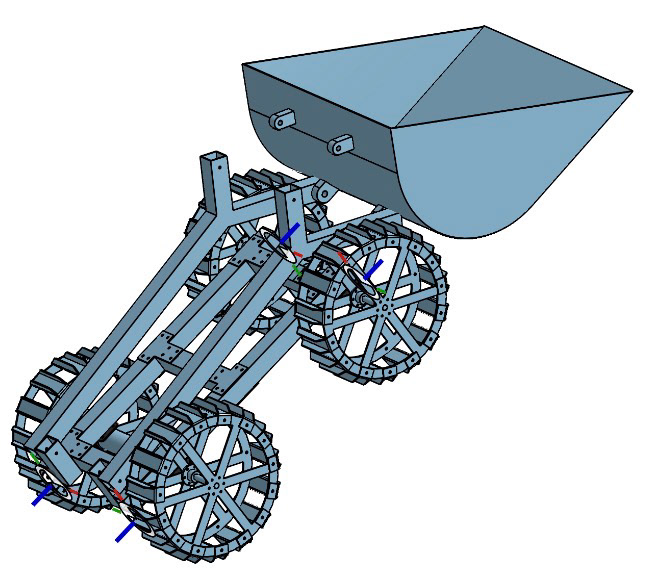
Working with a partner, I took the flat design of the linkage and fitted CAD models of real components for the actuators which we had found, and created the first model. After a week or so of working, I had a V0 model. It had individual components, mated as they would be in real life. Above is the cad model with my movement diagram, and below are examples from that first CAD.
Over six months I went through two control gates, feedback sessions, discussions with my group, and we iterated through several different versions. This step was when I went from the macro to the micro. It wasn’t just readable geometry, it was placing fasteners and welds.
This involved hundreds of hours of cad, often late into the early morning sitting on my couch trying to stay awake, to create custom joints, placing over one hundred fasteners. I iterated through every part of the robot to hit design constraints like mass < 60 kg, lift capacity > 30 kg, and the exact dimensions of 150 cm x 75 cm x 75 cm.
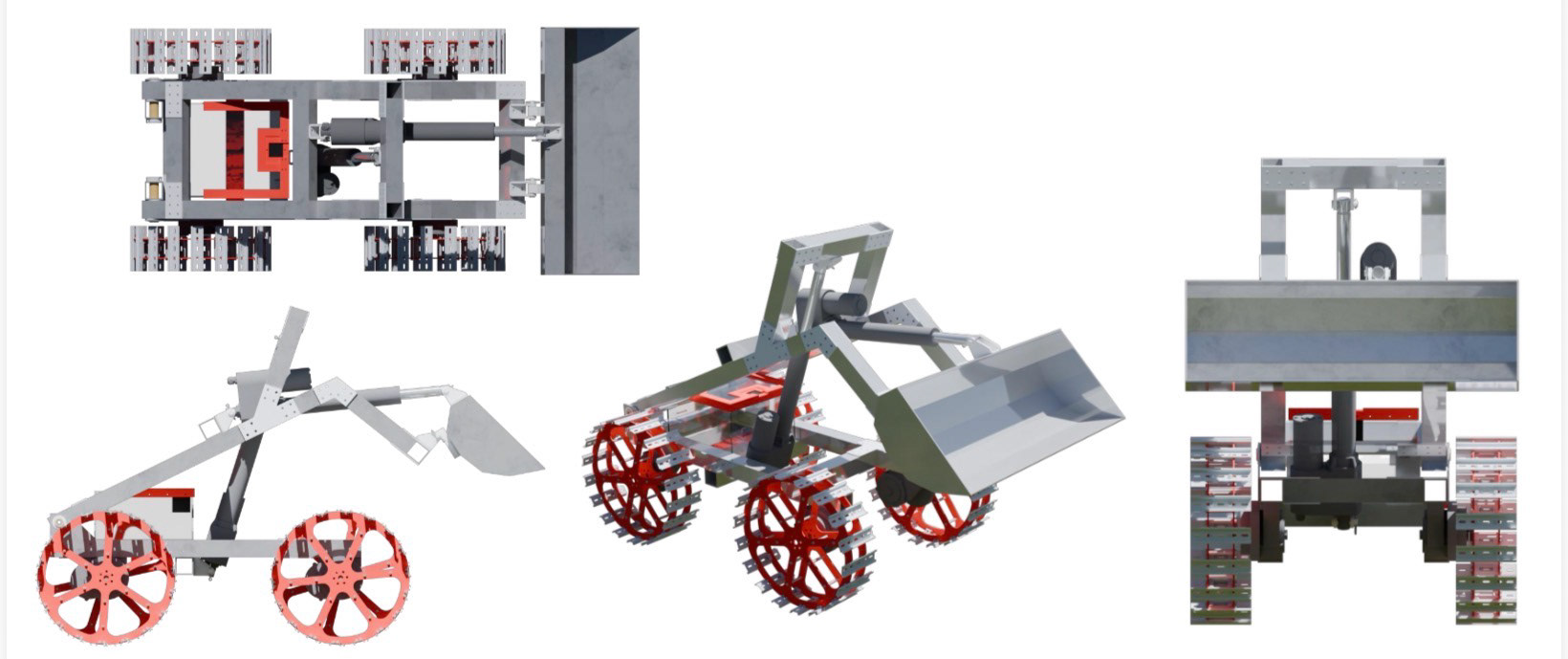
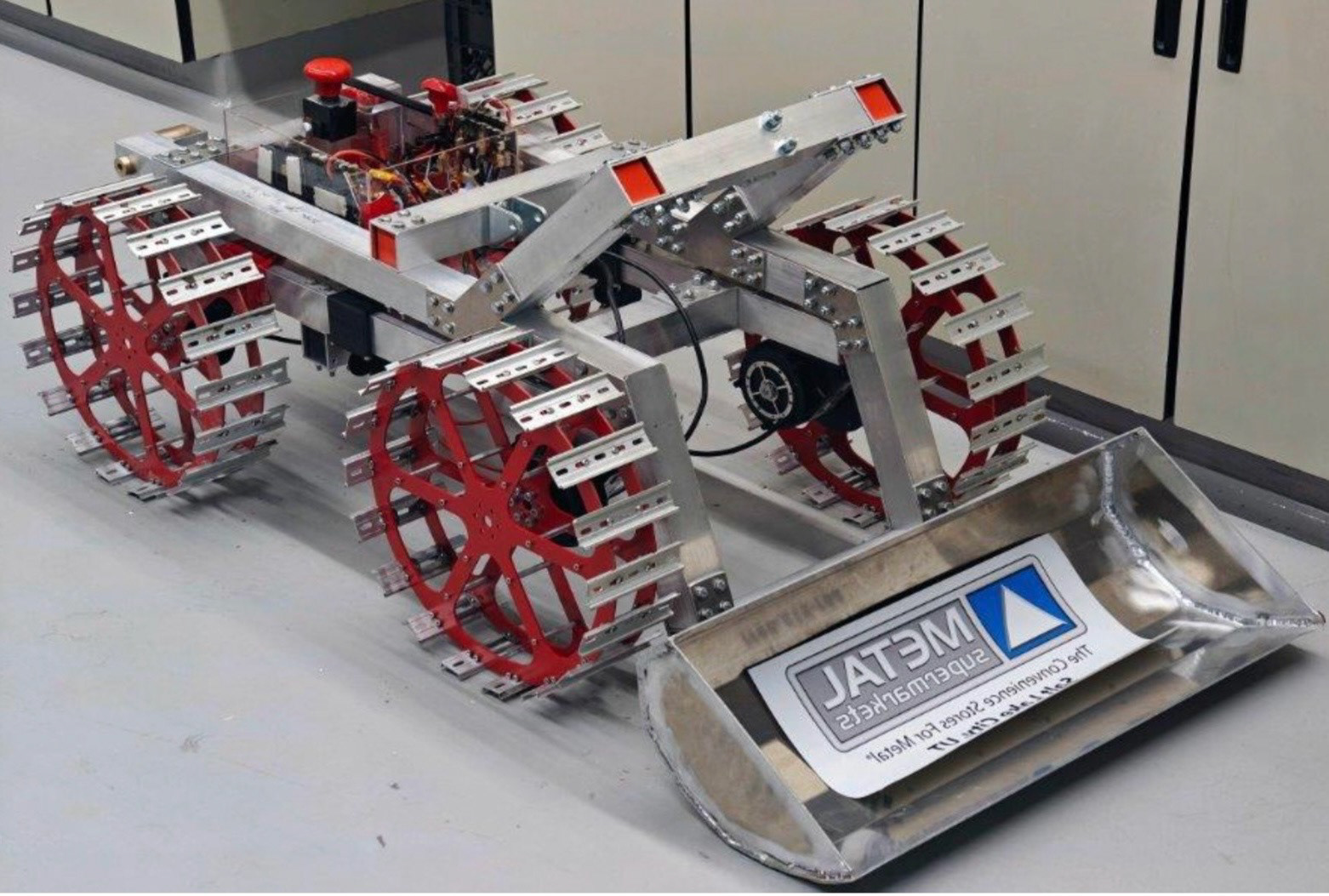
If you compare the above rendering with the finished V1 robot on the right, you’ll see how accurate the CAD model was.
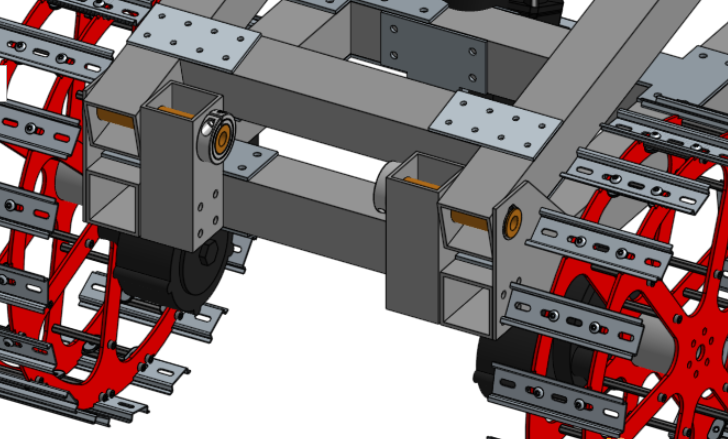
I personally spent multiple weeks cutting, shaving, demurring, and drilling to put this model together. First the Chassis was assembled, and then the boom arm was assembled and attached. It was incredibly satisfying to see, once again, the designs I had worked on so hard come to life.

Of all the things that made TERI successful, I think what really put it above the rest was the thousands of man hours spent testing and improving.
The biggest leadership challenge of the entire year was, as President, being the one to motivate my team to spend their nights, weekends, and breaks testing this robot. It was already ‘good enough’, but we had not hit our driving system requirements. It had a hard time turning, the camera’s didn’t have enough range, and it was tipping. It was a combination of motivational words, firm expectations, and often simply leading the charge on every step that got the team there.
I completed the Utah RAPTOR Test Pit just in time for the end of year testing. There were probably two dozen nights in the last month where we simply had too much to do before sunset.
Every test was somewhat similar. I would come prepared with a series of system requirements, and we would push the robot to its limits where either we broke a component, or it simply quit. Each of us took notes, which I then compiled into a list of tasks to give to each member of the team. I worked with each person to make sure we got that done, which often involved me working on CAD through meals and running to the 3D printing lab first thing every morning. Then once we implemented the new design, we started over.
