Overview
The Elephantine Lunar Excavator (ELE) is a conceptual design for a robust lunar excavation system. Developed as part NASA Lunabotics, ELE placed 3rd out of 43 universities' robots.
The Elephantine Lunar Excavator (ELE) is a conceptual design for a robust lunar excavation system. Developed as part NASA Lunabotics, ELE placed 3rd out of 43 universities' robots.
CAD Modelling
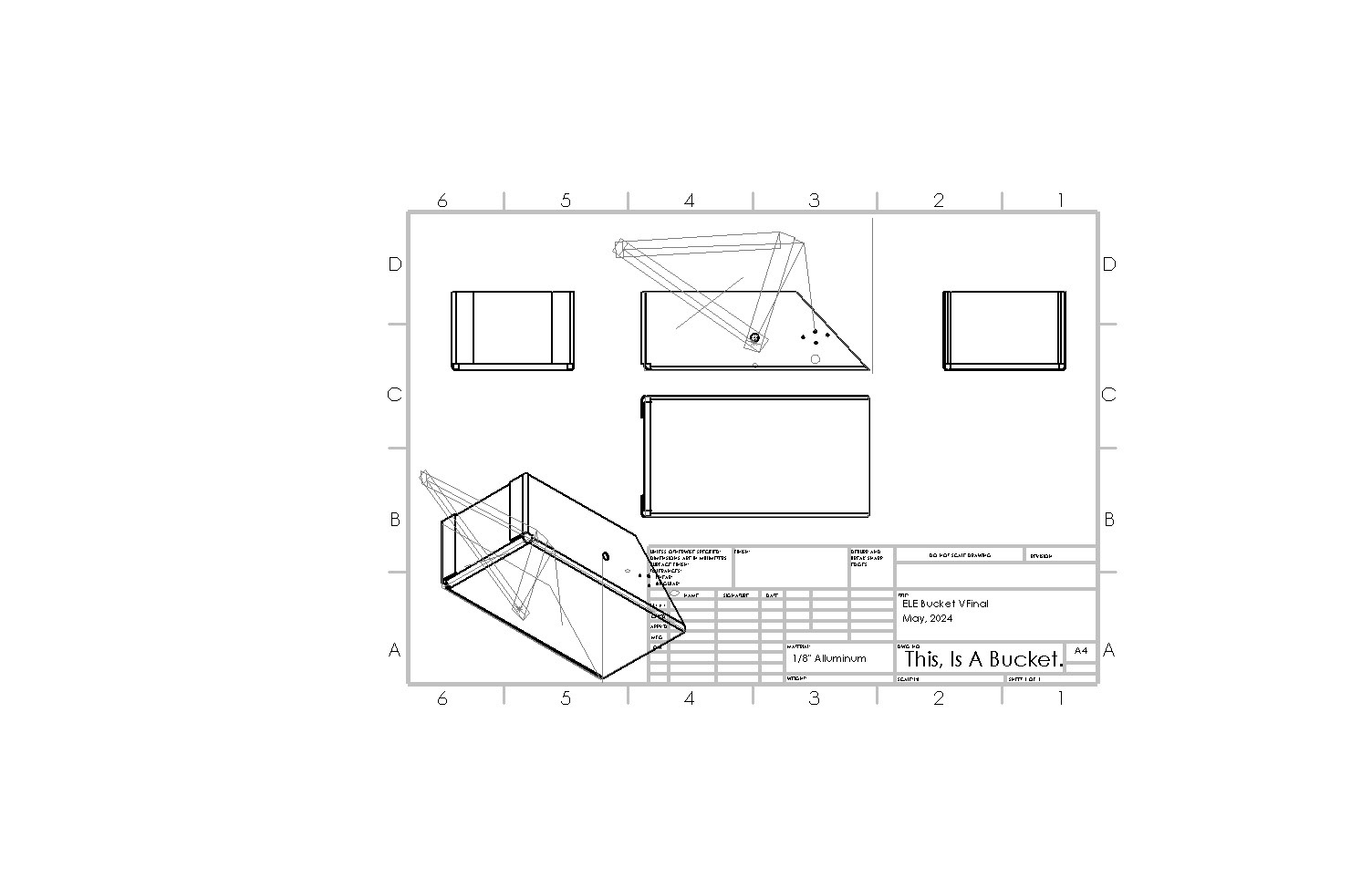
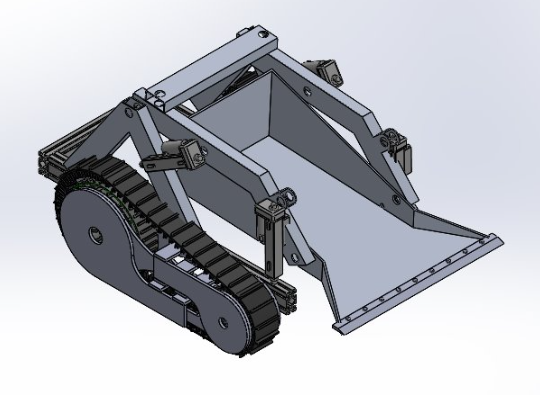
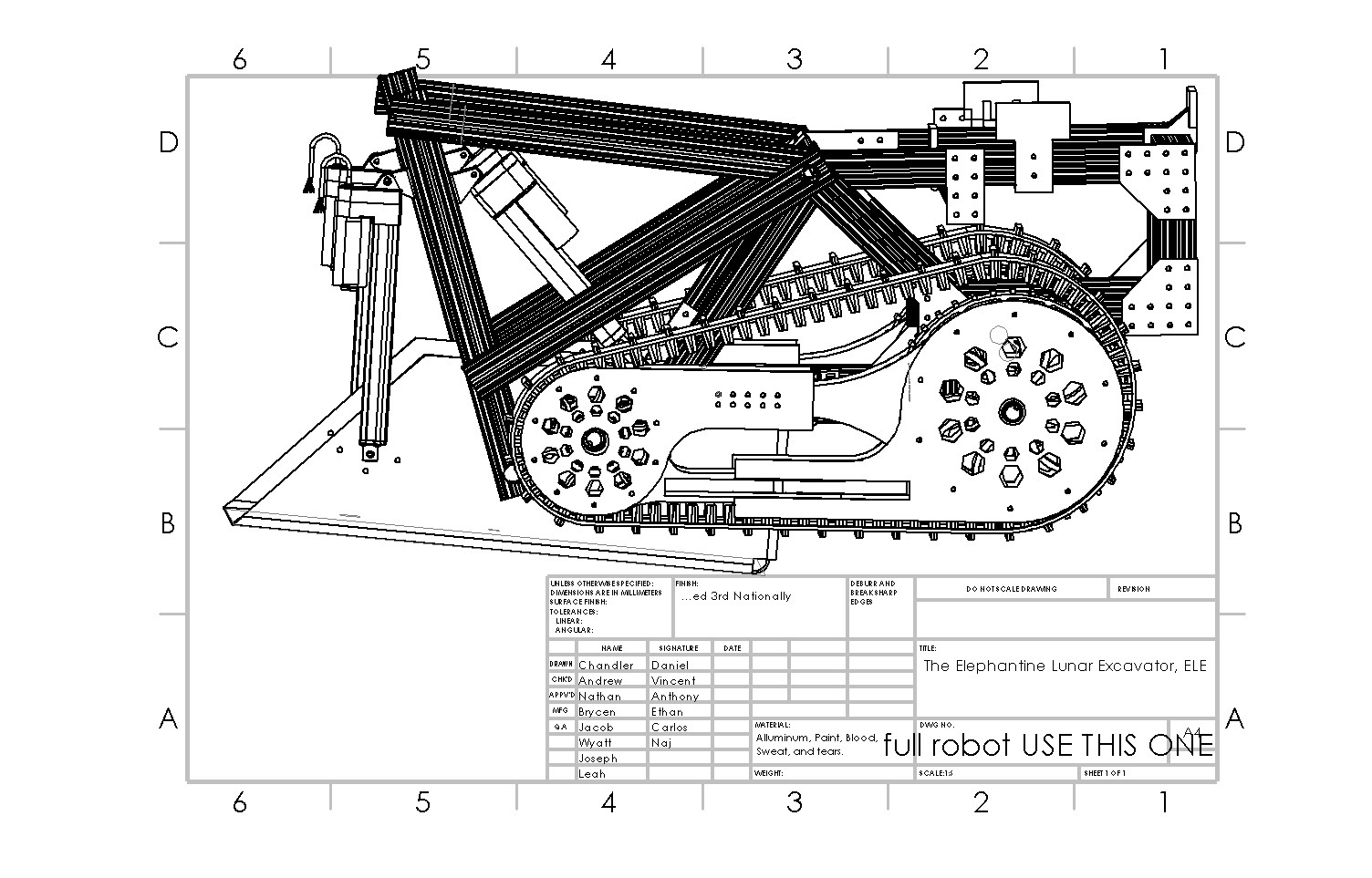
Using SolidWorks, I created a full 3D model of ELE, including the chassis, articulated arms, bucket assemblies and drivetrain. The modelling process involved careful consideration of kinematics, tolerances, and assembly constraints. Detailed drawings and exploded views were produced to guide fabrication. This design was updated throughout the development process to hit system requirements.
Using SolidWorks, I created a full 3D model of ELE, including the chassis, articulated arms, bucket assemblies and drivetrain. The modelling process involved careful consideration of kinematics, tolerances, and assembly constraints. Detailed drawings and exploded views were produced to guide fabrication. This design was updated throughout the development process to hit system requirements.
Analysis and Optimization
Finite element analysis (FEA) was performed on critical components to ensure that the design could withstand lunar gravity and excavation forces while remaining lightweight. Iterative simulations helped optimize material selection and geometry, resulting in a design that balances strength, weight, and manufacturability.
Finite element analysis (FEA) was performed on critical components to ensure that the design could withstand lunar gravity and excavation forces while remaining lightweight. Iterative simulations helped optimize material selection and geometry, resulting in a design that balances strength, weight, and manufacturability.