Overview
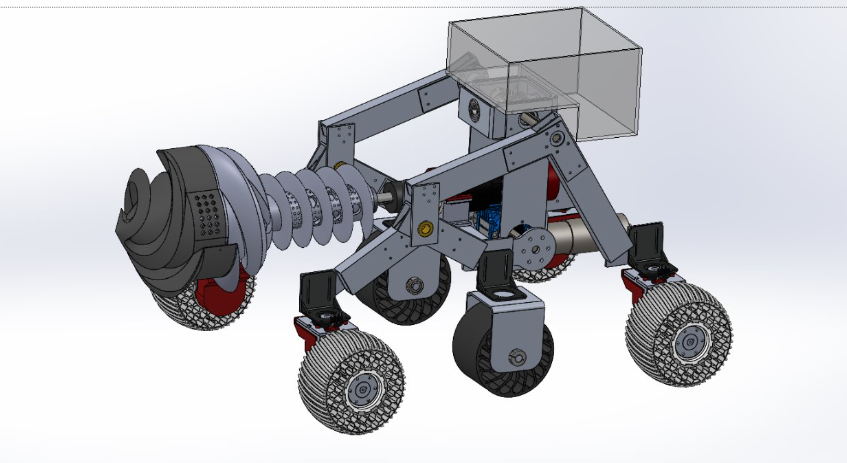
NASA's Lunar Mining challenge was to, in a real physical (but simulated) environment: mine for lunar ice rocks buried under 45-75cm of regolith, sort rocks from dust, and deposit them in a raised hopper. My response was to build a custom central auger or "Archimedes Screw", which would remain underground while trenching.
Design and Mechanism
Over the course of 9 months, I worked on a team of 8 to design, program, wire, and test Archimedes. This gave me valuable experience communicating technical work, drawings, and also working with designs from other members of the team. I used SolidWorks for the designs and renderings, pictured below.
The design significantly changed as a result of our control gates. A faculty advisor pointed out that the rocker bogie supplied mobility far beyond our scope at a steep complexity and weight cost, so it was removed. I reworked that chassis, and built something much simpler using four wheels, pictured to the right.

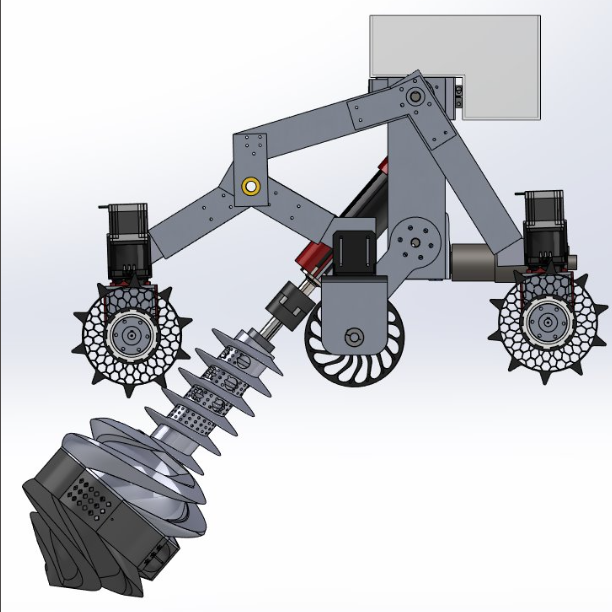
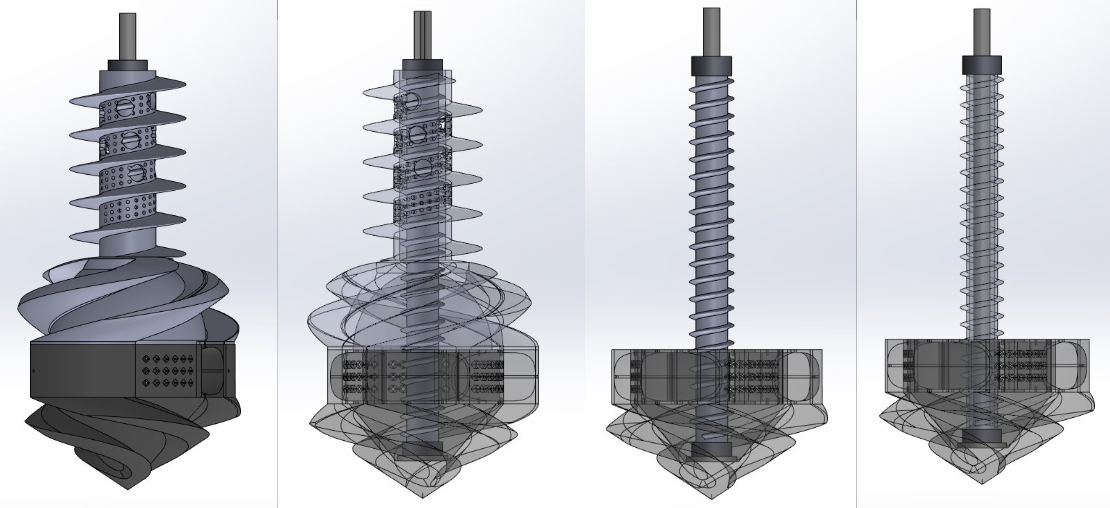
By far the most creative solution in this robot was the mining setup. The central auger used a perpendicular drum digger, spun by planetary gears hitched to an incredibly strong motor in the center. The drum was then lowered into the regolith, and while spinning below grade it was dragged across the mining area.
The perforations along the drum and screw resulted in a passive filter, pushing the ice chunks and draining everything else. When full, Archimedes returned to the hopper and would spin the drum in reverse, dumping the collected materials.

Results
This is a still from our Proof of Life Video. Pictured is the robot, auger, and testing environment that I created out of a salt storage facility. Archimedes was able to traverse, dig, and dump. The weakeness of this robot was in the construction materials for the Auger. My biggest lesson was to balance the design of materials with the complexity of the design. Even if it didn't take awards like my others, I'm still proud of this working robot.